Straight out of the lab, we are sharing the news of successful completion of our Eurostars2 project “Vision Based Navigation system (VBN) for autonomous satellite navigation in space” (VBN-115088). Working closely with our partner, the Space Robotics (SpaceR) Research Group from the University of Luxembourg’s Interdisciplinary Centre for Security, Reliability and Trust (SnT) over the past 2 years, we developed, tested and validated advanced navigation and control algorithms for small satellites. The algorithms are capable of detecting, identifying and performing rendezvous with objects in space autonomously.
The Vision Based Navigation (VBN) system in the scope of this project, was composed of a development model and software algorithms based on AI.
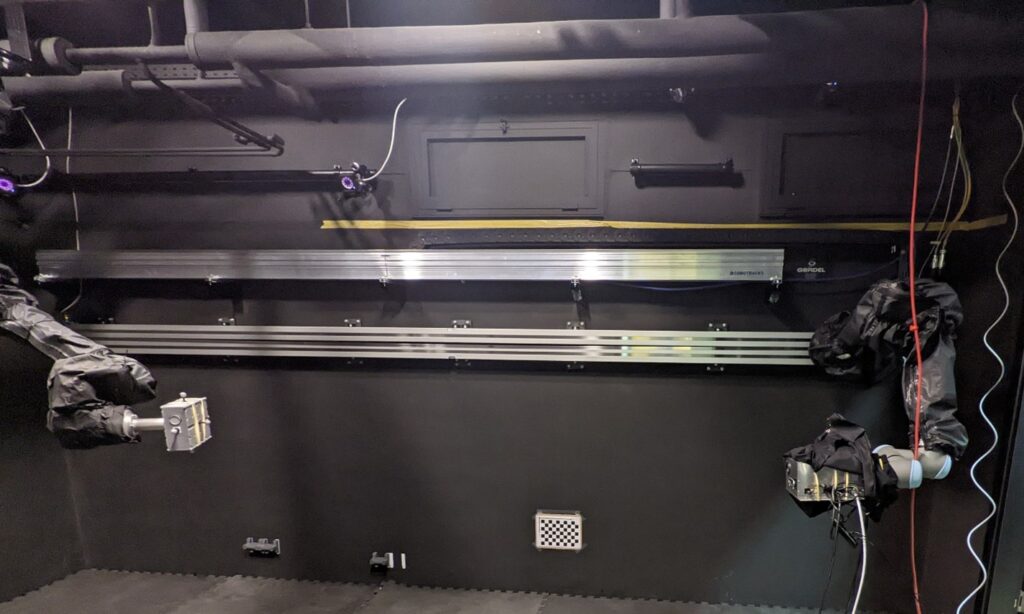
Blackswan Space was the project’s coordinator responsible for developing AI based navigation software and the overall project management. While SpaceR-SnT provided the control algorithm for the VBN system as well as the laboratory test facilities at the Zero-G lab, which were necessary for open and closed loop VBN tests.
All the major milestones of the project have been successfully reached by the consortium and a functioning Vision Based Navigation system prototype for rendezvous and docking of small satellites has been validated. This marks an important milestone in our product development roadmap as we approach closer to gradually demonstrating the full capabilities of our ACE software platform. ACE is dedicated to complex missions, while also enabling autonomous rendezvous and proximity operations (RPO) in extremely challenging conditions. Next steps would involve further validation and verification of the VBN system in different scenarios and preparation of its flight model to be tested in space in 2025.